|
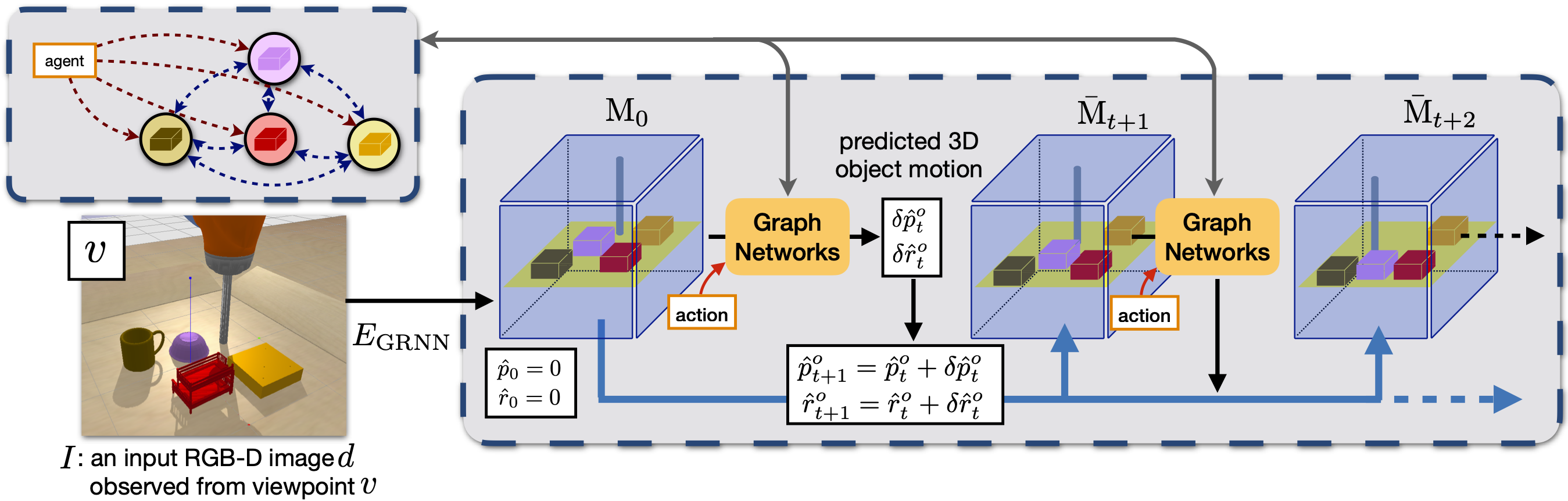
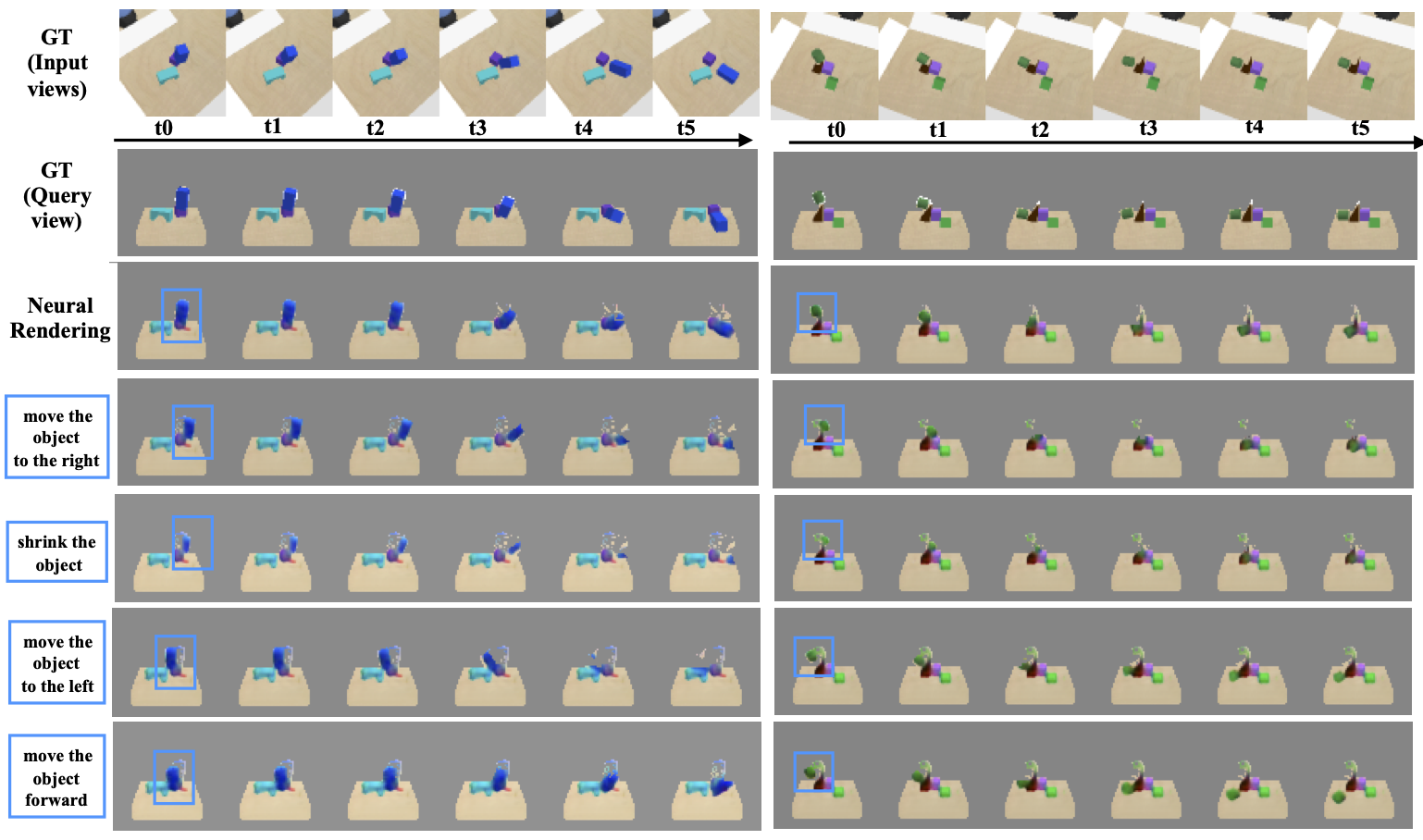
3D-OES predict 3D object motion under agent-object and object-object interactions, using a graph neural network over 3D feature maps of detected objects. Node features capture the appearance of an object node and its immediate context, and edge features capture relative 3D locations between two nodes, so the model is translational invariant. After message passing between nodes, the node and edge features are decoded to future 3D rotations and translations for each object.
|